Digital Image Processing
Digital image processing
deals with manipulation of digital images through a digital computer. It is a
subfield of signals and systems but focus particularly on images. DIP focuses
on developing a computer system that is able to perform processing on an image.
The input of that system is a digital image and the system process that image
using efficient algorithms, and gives an image as an output. The most common
example is Adobe Photoshop. It is one of the widely used application for
processing digital images.
How it works.

In the above figure, an
image has been captured by a camera and has been sent to a digital system to
remove all the other details, and just focus on the water drop by zooming it in
such a way that the quality of the image remains the same.
Digital
Image Processing Introduction
Introduction
Signal processing is a discipline in electrical engineering and in
mathematics that deals with analysis and processing of analog and digital
signals , and deals with storing , filtering , and other operations on signals.
These signals include transmission signals , sound or voice signals , image
signals , and other signals e.t.c.
Out of all these signals , the field that deals with the type of
signals for which the input is an image and the output is also an image is done
in image processing. As it name suggests, it deals with the processing on images.
It can be further divided into analog image processing and digital
image processing.
Analog image processing
Analog image processing is done on analog signals. It includes
processing on two dimensional analog signals. In this type of processing, the
images are manipulated by electrical means by varying the electrical signal.
The common example include is the television image.
Digital image processing has dominated over analog image
processing with the passage of time due its wider range of applications.
Digital image processing
The digital image processing deals with developing a digital
system that performs operations on an digital image.
What is an Image
An image is nothing more than a two dimensional signal. It is
defined by the mathematical function f(x,y) where x and y are the two
co-ordinates horizontally and vertically.
The value of f(x,y) at any point is gives the pixel value at that
point of an image.

The above figure is an example of digital image that you are now
viewing on your computer screen. But actually , this image is nothing but a two
dimensional array of numbers ranging between 0 and 255.
|
128
|
30
|
123
|
|
232
|
123
|
321
|
|
123
|
77
|
89
|
|
80
|
255
|
255
|
Each number represents the value of the function f(x,y) at any
point. In this case the value 128 , 230 ,123 each represents an individual
pixel value. The dimensions of the picture is actually the dimensions of this
two dimensional array.
Relationship between a
digital image and a signal
If the image is a two dimensional array then what does it have to
do with a signal? In order to understand that , We need to first understand
what is a signal?
Signal
In physical world, any quantity measurable through time over space
or any higher dimension can be taken as a signal. A signal is a mathematical
function, and it conveys some information.
A signal can be one dimensional or two dimensional or higher
dimensional signal. One dimensional signal is a signal that is measured over
time. The common example is a voice signal.
The two dimensional signals are those that are measured over some
other physical quantities. The example of two dimensional signal is a digital
image. We will look in more detail in the next tutorial of how a one
dimensional or two dimensional signals and higher signals are formed and
interpreted.
Relationship
Since anything that conveys information or broadcast a message in
physical world between two observers is a signal. That includes speech or
(human voice) or an image as a signal. Since when we speak , our voice is
converted to a sound wave/signal and transformed with respect to the time to
person we are speaking to. Not only this , but the way a digital camera works,
as while acquiring an image from a digital camera involves transfer of a signal
from one part of the system to the other.
How a digital image is
formed
Since capturing an image from a camera is a physical process. The
sunlight is used as a source of energy. A sensor array is used for the
acquisition of the image. So when the sunlight falls upon the object, then the
amount of light reflected by that object is sensed by the sensors, and a
continuous voltage signal is generated by the amount of sensed data. In order
to create a digital image , we need to convert this data into a digital form.
This involves sampling and quantization. (They are discussed later on). The
result of sampling and quantization results in an two dimensional array or
matrix of numbers which are nothing but a digital image.
Overlapping fields
Machine/Computer vision
Machine vision or computer vision deals with developing a system
in which the input is an image and the output is some information. For example:
Developing a system that scans human face and opens any kind of lock. This
system would look something like this.

Computer graphics
Computer graphics deals with the formation of images from object
models, rather then the image is captured by some device. For example: Object
rendering. Generating an image from an object model. Such a system would look
something like this.

Artificial intelligence
Artificial intelligence is more or less the study of putting human
intelligence into machines. Artificial intelligence has many applications in
image processing. For example: developing computer aided diagnosis systems that
help doctors in interpreting images of X-ray , MRI e.t.c and then highlighting
conspicuous section to be examined by the doctor.
Signal processing
Signal processing is an umbrella and image processing lies under
it. The amount of light reflected by an object in the physical world (3d world)
is pass through the lens of the camera and it becomes a 2d signal and hence
result in image formation. This image is then digitized using methods of signal
processing and then this digital image is manipulated in digital image
processing.
Fundamental Steps of Digital Image
Processing:
There are some fundamental steps but as they are fundamental,
all these steps may have sub-steps. The fundamental steps are described below
with a neat diagram.
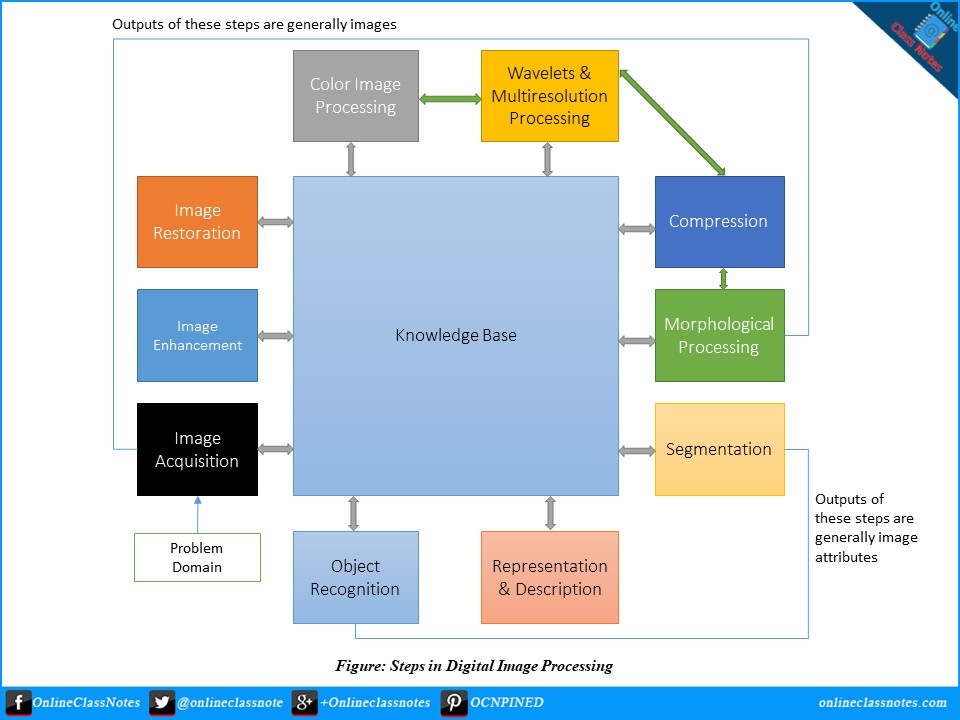
1. Image Acquisition:
This is the first step or process of the fundamental steps of
digital image processing. Image acquisition could be as simple as being given
an image that is already in digital form. Generally, the image acquisition
stage involves pre-processing, such as scaling etc.
2. Image Enhancement:
Image enhancement is among the simplest and most appealing areas
of digital image processing. Basically, the idea behind enhancement techniques
is to bring out detail that is obscured, or simply to highlight certain
features of interest in an image. Such as, changing brightness & contrast
etc.
3. Image Restoration:
Image restoration is an area that also deals with improving the
appearance of an image. However, unlike enhancement, which is subjective, image
restoration is objective, in the sense that restoration techniques tend to be
based on mathematical or probabilistic models of image degradation.
4. Color Image Processing:
Color image processing is an area that has been gaining its
importance because of the significant increase in the use of digital images
over the Internet. This may include color modeling and processing in a digital
domain etc.
5. Wavelets and
Multi-Resolution Processing:
Wavelets are the foundation for representing images in various
degrees of resolution. Images subdivision successively into smaller regions for
data compression and for pyramidal representation.
6. Compression:
Compression deals with techniques for reducing the storage
required to save an image or the bandwidth to transmit it. Particularly in the
uses of internet it is very much necessary to compress data.
Fundamentals
of Digital Image Processing
•
Applications
of image processing
· What's an image?
· A simple image model
· Fundamental steps in image processing
· Elements of digital image processing
systems


Concept of Sampling
Conversion of analog
signal to digital signal:
The output of most of the image sensors is an analog signal, and
we can not apply digital processing on it because we can not store it. We can
not store it because it requires infinite memory to store a signal that can
have infinite values.
So we have to convert an analog signal into a digital signal.
To create an image which is digital, we need to covert continuous
data into digital form. There are two steps in which it is done.
- Sampling
- Quantization
We will discuss sampling now, and quantization will be discussed
later on but for now on we will discuss just a little about the difference
between these two and the need of these two steps.
Basic idea:
The basic idea behind converting an analog signal to its digital
signal is

to convert both of its axis (x,y) into a digital format.
Since an image is continuous not just in its co-ordinates (x
axis), but also in its amplitude (y axis), so the part that deals with the
digitizing of co-ordinates is known as sampling. And the part that deals with
digitizing the amplitude is known as quantization.
Sampling.
Sampling has already been introduced in our tutorial of
introduction to signals and system. But we are going to discuss here more.
Here what we have discussed of the sampling.
The term sampling refers to take samples
We digitize x axis in sampling
It is done on independent variable
In case of equation y = sin(x), it is done on x variable
It is further divided into two parts , up sampling and down
sampling

If you will look at the above figure, you will see that there are
some random variations in the signal. These variations are due to noise. In
sampling we reduce this noise by taking samples. It is obvious that more
samples we take, the quality of the image would be more better, the noise would
be more removed and same happens vice versa.
However, if you take sampling on the x axis, the signal is not
converted to digital format, unless you take sampling of the y-axis too which
is known as quantization. The more samples eventually means you are collecting
more data, and in case of image, it means more pixels.
Relation ship with
pixels
Since a pixel is a smallest element in an image. The total number
of pixels in an image can be calculated as
Pixels = total no of rows * total no of columns.
Lets say we have total of 25 pixels, that means we have a square
image of 5 X 5. Then as we have dicussed above in sampling, that more samples
eventually result in more pixels. So it means that of our continuous signal, we
have taken 25 samples on x axis. That refers to 25 pixels of this image.
This leads to another conclusion that since pixel is also the
smallest division of a CCD array. So it means it has a relationship with CCD
array too, which can be explained as this.
Relationship with CCD
array
The number of sensors on a CCD array is directly equal to the
number of pixels. And since we have concluded that the number of pixels is
directly equal to the number of samples, that means that number sample is
directly equal to the number of sensors on CCD array.
Oversampling.
In the beginning we have define that sampling is further
categorize into two types. Which is up sampling and down sampling. Up sampling
is also called as over sampling.
The oversampling has a very deep application in image processing
which is known as Zooming.
Zooming
We will formally introduce zooming in the upcoming tutorial, but
for now on, we will just briefly explain zooming.
Zooming refers to increase the quantity of pixels, so that when
you zoom an image, you will see more detail.
The increase in the quantity of pixels is done through
oversampling. The one way to zoom is, or to increase samples, is to zoom optically,
through the motor movement of the lens and then capture the image. But we have
to do it, once the image has been captured.
There is a difference between zooming and
sampling
The concept is same, which is, to increase samples. But the key
difference is that while sampling is done on the signals, zooming is done on
the digital image.
Pixel
We have already defined a pixel in our tutorial of concept of
pixel, in which we define a pixel as the smallest element of an image. We also
defined that a pixel can store a value proportional to the light intensity at
that particular location.
Now since we have defined a pixel, we are going to define what is
resolution.
Resolution
The resolution can be defined in many ways. Such as pixel
resolution, spatial resolution, temporal resolution, spectral resolution. Out
of which we are going to discuss pixel resolution.
You have probably seen that in your own computer settings, you
have monitor resolution of 800 x 600, 640 x 480 e.t.c
In pixel resolution, the term resolution refers to the total
number of count of pixels in an digital image. For example. If an image has M
rows and N columns, then its resolution can be defined as M X N.
If we define resolution as the total number of pixels, then pixel
resolution can be defined with set of two numbers. The first number the width
of the picture, or the pixels across columns, and the second number is height
of the picture, or the pixels across its width.
We can say that the higher is the pixel resolution, the higher is
the quality of the image.
We can define pixel resolution of an image as 4500 X 5500.
Megapixels
We can calculate mega pixels of a camera using pixel resolution.
Column pixels (width ) X row pixels ( height ) / 1 Million.
The size of an image can be defined by its pixel resolution.
Size = pixel resolution X bpp ( bits per pixel )
UNIT-II:
Gray Level Transformation
We have discussed some of the basic transformations in our
tutorial of Basic transformation. In this tutorial we will look at some of the
basic gray level transformations.
Image enhancement
Enhancing an image provides better contrast and a more detailed
image as compare to non enhanced image. Image enhancement has very
applications. It is used to enhance medical images, images captured in remote
sensing, images from satellite e.t.c
The transformation function has been given below
s = T ( r )
where r is the pixels of the input image and s is the pixels of
the output image. T is a transformation function that maps each value of r to
each value of s. Image enhancement can be done through gray level
transformations which are discussed below.
Gray level
transformation
There are three basic gray level transformation.
- Linear
- Logarithmic
- Power – law
The overall graph of these transitions has been shown below.

Linear transformation
First we will look at the linear transformation. Linear
transformation includes simple identity and negative transformation. Identity
transformation has been discussed in our tutorial of image transformation, but
a brief description of this transformation has been given here.
Identity transition is shown by a straight line. In this
transition, each value of the input image is directly mapped to each other
value of output image. That results in the same input image and output image.
And hence is called identity transformation. It has been shown below:

Negative transformation
The second linear transformation is negative transformation, which
is invert of identity transformation. In negative transformation, each value of
the input image is subtracted from the L-1 and mapped onto the output image.
The result is somewhat like this.
Input Image

Output Image

In this case the following transition has been done.
s = (L – 1) – r
since the input image of Einstein is an 8 bpp image, so the number
of levels in this image are 256. Putting 256 in the equation, we get this
s = 255 – r
So each value is subtracted by 255 and the result image has been
shown above. So what happens is that, the lighter pixels become dark and the
darker picture becomes light. And it results in image negative.
It has been shown in the graph below.

Logarithmic
transformations
Logarithmic transformation further contains two type of
transformation. Log transformation and inverse log transformation.
Log transformation
The log transformations can be defined by this formula
s = c log(r + 1).
Where s and r are the pixel values of the output and the input
image and c is a constant. The value 1 is added to each of the pixel value of
the input image because if there is a pixel intensity of 0 in the image, then
log (0) is equal to infinity. So 1 is added, to make the minimum value at least
1.
During log transformation, the dark pixels in an image are
expanded as compare to the higher pixel values. The higher pixel values are
kind of compressed in log transformation. This result in following image
enhancement.
The value of c in the log transform adjust the kind of enhancement
you are looking for.
Input Image

Log Tranform Image

The inverse log transform is opposite to log transform.
Power – Law
transformations
There are further two transformation is power law transformations,
that include nth power and nth root transformation. These transformations can
be given by the expression:
s=cr^γ
This symbol γ is called gamma, due to which this transformation is
also known as gamma transformation.
Variation in the value of γ varies the enhancement of the images.
Different display devices / monitors have their own gamma correction, that’s
why they display their image at different intensity.
This type of transformation is used for enhancing images for
different type of display devices. The gamma of different display devices is
different. For example Gamma of CRT lies in between of 1.8 to 2.5, that means
the image displayed on CRT is dark.
Correcting gamma.
s=cr^γ
s=cr^(1/2.5)
The same image but with different gamma values has been shown
here.
For example
Gamma = 10

Gamma = 8

Gamma = 6

Histogram Equalization
We have already seen that contrast can be increased using
histogram stretching. In this tutorial we will see that how histogram
equalization can be used to enhance contrast.
Before performing histogram equalization, you must know two
important concepts used in equalizing histograms. These two concepts are known
as PMF and CDF.
They are discussed in our tutorial of PMF and CDF. Please visit
them in order to successfully grasp the concept of histogram equalization.
Histogram Equalization
Histogram equalization is used to enhance contrast. It is not
necessary that contrast will always be increase in this. There may be some
cases were histogram equalization can be worse. In that cases the contrast is
decreased.
Lets start histogram equalization by taking this image below as a
simple image.
Image

Histogram of this image
The histogram of this image has been shown below.

Now we will perform histogram equalization to it.
PMF
First we have to calculate the PMF (probability mass function) of
all the pixels in this image. If you donot know how to calculate PMF, please
visit our tutorial of PMF calculation.
CDF
Our next step involves calculation of CDF (cumulative distributive
function). Again if you donot know how to calculate CDF , please visit our
tutorial of CDF calculation.
Calculate CDF according to gray levels
Lets for instance consider this , that the CDF calculated in the
second step looks like this.
|
Gray Level Value
|
CDF
|
|
0
|
0.11
|
|
1
|
0.22
|
|
2
|
0.55
|
|
3
|
0.66
|
|
4
|
0.77
|
|
5
|
0.88
|
|
6
|
0.99
|
|
7
|
1
|
Then in this step you will multiply the CDF value with (Gray
levels (minus) 1) .
Considering we have an 3 bpp image. Then number of levels we have
are 8. And 1 subtracts 8 is 7. So we multiply CDF by 7. Here what we got after
multiplying.
|
Gray Level Value
|
CDF
|
CDF * (Levels-1)
|
|
0
|
0.11
|
0
|
|
1
|
0.22
|
1
|
|
2
|
0.55
|
3
|
|
3
|
0.66
|
4
|
|
4
|
0.77
|
5
|
|
5
|
0.88
|
6
|
|
6
|
0.99
|
6
|
|
7
|
1
|
7
|
Now we have is the last step, in which we have to map the new gray
level values into number of pixels.
Lets assume our old gray levels values has these number of pixels.
|
Gray Level Value
|
Frequency
|
|
0
|
2
|
|
1
|
4
|
|
2
|
6
|
|
3
|
8
|
|
4
|
10
|
|
5
|
12
|
|
6
|
14
|
|
7
|
16
|
Now if we map our new values to , then this is what we got.
|
Gray Level Value
|
New Gray Level Value
|
Frequency
|
|
0
|
0
|
2
|
|
1
|
1
|
4
|
|
2
|
3
|
6
|
|
3
|
4
|
8
|
|
4
|
5
|
10
|
|
5
|
6
|
12
|
|
6
|
6
|
14
|
|
7
|
7
|
16
|
Now map these new values you are onto histogram, and you are done.
Lets apply this technique to our original image. After applying we
got the following image and its following histogram.
Histogram Equalization Image

Cumulative Distributive function of this image

Histogram Equalization histogram

Comparing both the histograms and images

Conclusion
As you can clearly see from the images that the new image contrast
has been enhanced and its histogram has also been equalized. There is also one
important thing to be note here that during histogram equalization the overall
shape of the histogram changes, where as in histogram stretching the overall
shape of histogram remains same.
High Pass vs Low Pass Filters
In the last tutorial, we briefly discuss about filters. In this
tutorial we will thoroughly discuss about them. Before discussing about let’s
talk about masks first. The concept of mask has been discussed in our tutorial
of convolution and masks.
Blurring masks vs
derivative masks
We are going to perform a comparison between blurring masks and
derivative masks.
Blurring masks
A blurring mask has the following properties.
- All the values in blurring
masks are positive
- The sum of all the values is
equal to 1
- The edge content is reduced by
using a blurring mask
- As the size of the mask grow,
more smoothing effect will take place
Derivative masks
A derivative mask has the following properties.
- A derivative mask have positive
and as well as negative values
- The sum of all the values in a
derivative mask is equal to zero
- The edge content is increased
by a derivative mask
- As the size of the mask grows ,
more edge content is increased
Relationship between blurring mask and
derivative mask with high pass filters and low pass filters.
The relationship between blurring mask and derivative mask with a
high pass filter and low pass filter can be defined simply as.
- Blurring masks are also called
as low pass filter
- Derivative masks are also
called as high pass filter
High pass frequency components and Low pass
frequency components
The high pass frequency components denotes edges whereas the low
pass frequency components denotes smooth regions.
Ideal low pass and Ideal High pass filters
This is the common example of low pass filter.

When one is placed inside and the zero is placed outside , we got
a blurred image. Now as we increase the size of 1, blurring would be increased
and the edge content would be reduced.
This is a common example of high pass filter.

When 0 is placed inside, we get edges, which gives us a sketched
image. An ideal low pass filter in frequency domain is given below.

The ideal low pass filter can be graphically represented as

Now let’s apply this filter to an actual image and let’s see what
we got.
Sample image

Image in frequency domain

Applying filter over this image

Resultant Image

With the same way, an ideal high pass filter can be applied on an
image. But obviously the results would be different as, the low pass reduces
the edged content and the high pass increase it.
Gaussian Low pass and
Gaussian High pass filter
Gaussian low pass and Gaussian high pass filter minimize the
problem that occur in ideal low pass and high pass filter.
This problem is known as ringing effect. This is due to reason
because at some points transition between one color to the other cannot be
defined precisely, due to which the ringing effect appears at that point.
Have a look at this graph.
This is the representation of ideal low pass filter. Now at the
exact point of Do, you cannot tell that the value would be 0 or 1. Due to which
the ringing effect appears at that point.
So in order to reduce the effect that appears is ideal low pass
and ideal high pass filter, the following Gaussian low pass filter and Gaussian
high pass filter is introduced.
Gaussian Low pass filter
The concept of filtering and low pass remains the same, but only
the transition becomes different and become more smooth.
The Gaussian low pass filter can be represented as

Note the smooth curve transition, due to which at each point, the
value of Do, can be exactly defined.
Gaussian high pass filter
Gaussian high pass filter has the same concept as ideal high pass
filter, but again the transition is more smooth as compared to the ideal one.
Introduction to Frequency domain
We have deal with images in many domains. Now we are processing
signals (images) in frequency domain. Since this Fourier series and frequency
domain is purely mathematics, so we will try to minimize that math’s part and
focus more on its use in DIP.
Frequency domain
analysis
Till now, all the domains in which we have analyzed a signal , we
analyze it with respect to time. But in frequency domain we don’t analyze
signal with respect to time, but with respect of frequency.
Difference between spatial domain and frequency
domain
In spatial domain, we deal with images as it is. The value of the
pixels of the image change with respect to scene. Whereas in frequency domain,
we deal with the rate at which the pixel values are changing in spatial domain.
For simplicity, Let’s put it this way.
Spatial domain

In simple spatial domain, we directly deal with the image matrix.
Whereas in frequency domain, we deal an image like this.
Frequency Domain
We first transform the image to its frequency distribution. Then
our black box system perform what ever processing it has to performed, and the
output of the black box in this case is not an image, but a transformation.
After performing inverse transformation, it is converted into an image which is
then viewed in spatial domain.
It can be pictorially viewed as

Here we have used the word transformation. What does it actually
mean?
Transformation
A signal can be converted from time domain into frequency domain
using mathematical operators called transforms. There are many kind of
transformation that does this. Some of them are given below.
- Fourier Series
- Fourier transformation
- Laplace transform
- Z transform
Out of all these, we will thoroughly discuss Fourier series and
Fourier transformation in our next tutorial.
Frequency components
Any image in spatial domain can be represented in a frequency
domain. But what do this frequencies actually mean.
We will divide frequency components into two major components.
High frequency components
High frequency components correspond to edges in an image.
Low frequency components
Low frequency components in an image correspond to smooth regions.
………………………………..
Homomorphic filtering
is a generalized technique for signal and
image processing, involving a nonlinear mapping to a different domain in which
linear filter techniques are applied, followed by mapping back
to the original domain.
Image
restoration tutorial point
Image
restoration is performed by reversing
the process that blurred the imageand such is performed by imaging
a point source and use the point source image,
which is called the Point Spread Function (PSF) to restore the image information
lost to the blurring process.
Image Restoration is the operation of taking a corrupt/noisy image and
estimating the clean, original image. Corruption may come in many forms such
as motion
blur, noise and camera
mis-focus.[1] Image restoration
is performed by reversing the process that blurred the image and such is
performed by imaging a point source and use the point source image, which is
called the Point Spread Function (PSF) to restore the image information lost to
the blurring process.
Image
restoration is different from image enhancement in that the latter
is designed to emphasize features of the image that make the image more
pleasing to the observer, but not necessarily to produce realistic data from a
scientific point of view. Image enhancement techniques (like contrast stretching or de-blurring by a nearest neighbor procedure) provided
by imaging packages use no a priori model of the process that
created the image.
With
image enhancement noise can effectively be removed by sacrificing some
resolution, but this is not acceptable in many applications. In a fluorescence microscope, resolution in the z-direction is bad as it is. More advanced
image processing techniques must be applied to recover the object.
Wiener
Filtering
Theory
The
inverse filtering is a restoration technique for deconvolution, i.e., when the
image is blurred by a known lowpass filter, it is possible to recover the image
by inverse filtering or generalized inverse filtering. However, inverse
filtering is very sensitive to additive noise. The approach of reducing one degradation
at a time allows us to develop a restoration algorithm for each type of
degradation and simply combine them. The Wiener filtering executes an optimal
tradeoff between inverse filtering and noise smoothing. It removes the additive
noise and inverts the blurring simultaneously.
The
Wiener filtering is optimal in terms of the mean square error. In other words,
it minimizes the overall mean square error in the process of inverse filtering
and noise smoothing. The Wiener filtering is a linear estimation of the
original image. The approach is based on a stochastic framework. The
orthogonality principle implies that the Wiener filter in Fourier domain can be
expressed as follows:

Morphological Operations
UNIT-III:
Fourier Series
Fourier series simply states that
, periodic signals can be represented into sum of sines and cosines when
multiplied with a certain weight.It further states that periodic signals can be
broken down into further signals with the following properties.
·
The
signals are sines and cosines
·
The
signals are harmonics of each other
It can be pictorially viewed as
Discrete Fourier Transform. Discrete Fourier Transform. Thediscrete Fourier transform (DFT) is "the Fourier transform for finite-length sequences" because, unlike the (discrete-space) Fourier transform, the DFT has a discrete argument and can be stored in a finite number of infinite word-length locations.
Transform methods in image processing. An image transform can be applied to an image to convert it from one domain to another. Viewing an image in domains such as frequency or Hough space enables the identification of features that may not be as easily detected in the spatial domain.
DTFT and DFT both are for discrete signal. but, in frequency domain, basicdifference is how many basis vectors you select to represent the signal. in DTFT, frequency axis is continuous which means you take infinite basis vectors.
The DCT, and in particular the DCT-II, is often used in signal andimage processing, especially for lossy compression, because it has a strong "energy compaction" property: in typical applications, most of the signal information tends to be concentrated in a few low-frequency components of the DCT.
The Haar-wavelet transform in digital image processing: its status and achievements. Image processing and analysis based on the continuous or discrete image transforms are classic techniques. The image transforms are widely used in imagefiltering, data description, etc.


No comments:
Post a Comment